Cuộc cách mạng hóa Đại dương: Những tiến bộ trong lĩnh vực Robot biển cho Quốc phòng, Nghiên cứu và Công nghiệp
Robot học là ngành chuyên về thiết kế và xây dựng robot cơ khí có thể lập trình được. Công việc của nó là mô phỏng các hành động của con người. Việc phát triển các robot như vậy để sử dụng trên biển là rất quan trọng đối với quốc phòng, nghiên cứu khoa học và các ứng dụng công nghiệp, bao gồm giám sát, theo dõi môi trường và chống thủy lôi, v.v.
Tàu thuyền cần được bảo trì thường xuyên và rất nhiều tài nguyên, từ nhiên liệu và bảo trì dầu cho đến làm sạch thường xuyên, một số lượng lớn các bộ phận và thiết bị cần được bảo dưỡng hoặc thay thế để giữ cho tàu ở trong tình trạng tốt. Rất nhiều thời gian, tất cả những nhiệm vụ này đều nguy hiểm và đầy thách thức khi được thực hiện bởi con người. Để đạt được mục tiêu này, robot có khả năng xử lý các nhiệm vụ như vậy. Ví dụ, HullBUG, một robot làm sạch thân tàu dưới nước, tự gắn vào đáy thuyền để làm sạch bề mặt. Một robot khác, robot lính cứu hỏa SAFFIR, là một robot hình người tự động có khả năng phát hiện và dập tắt đám cháy trên tàu, làm việc song song với con người.
Recon Robotics đã phát triển một robot nhỏ hình quả tạ có khả năng xuyên qua boong chính của một chiếc thuyền để kiểm tra kín đáo. Những phát triển này hiện đang được Hải quân Hoa Kỳ sử dụng. Camera trên robot cho phép người vận hành nhìn thấy những gì đang xảy ra trong thời gian thực, ngay cả vào ban đêm, với việc sử dụng các cảm biến hồng ngoại.
Hệ thống Robot Tự hành Biển
Phương tiện Dưới nước Tự hành– Viết tắt là AUV, là các phương tiện robot có thể được sử dụng cho các nhiệm vụ khảo sát dưới nước như lập bản đồ xác tàu đắm, lập bản đồ đáy biển và mô tả đặc điểm nước biển. Nó tiến hành các cuộc khảo sát mà không cần sự can thiệp của người vận hành, chúng có thể lập trình và quay trở lại vị trí được lập trình sẵn, nơi có thể tải xuống và xử lý dữ liệu
Phương tiện Bề mặt Tự hành– Viết tắt là ASV, là các phương tiện robot nằm trên bề mặt biển để thu thập dữ liệu hải dương học. Chúng có tải trọng và dung lượng pin lớn hơn so với tàu lượn. Chúng mang theo các mô-đun GPS và Iridium và thông qua đó, việc liên lạc và điều khiển được thực hiện. Chúng hữu ích cho việc thu thập thông tin giám sát bằng hình ảnh và thông tin thời tiết. Chúng được coi là những công cụ thu thập dữ liệu của tương lai, nơi ASV sẽ thu thập dữ liệu từ các phương tiện dưới nước và chuyển tiếp nó qua Iridium
Phương tiện điều khiển từ xa– Viết tắt là ROV, là những robot dưới nước có dây buộc không người lái, được liên kết với tàu bằng một nhóm cáp mang điện, tín hiệu video và dữ liệu giữa phương tiện và người vận hành
ISIS là ROV lặn sâu nhất của Vương quốc Anh. Nó thu thập các mẫu, khoan lõi trầm tích và ghi lại video độ nét cao, giúp có thể thực hiện các cuộc khảo sát phức tạp ở độ sâu mà thợ lặn không thể tiếp cận được
Tàu lượn– Một loại phương tiện dưới nước được sử dụng để đo các thông số hải dương học như nhiệt độ, mức độ chất diệp lục và độ mặn, sau đó truyền trở lại bờ. Nó sử dụng một máy bơm bên trong để thay đổi độ nổi của nó, cho phép nó di chuyển lên xuống trong nước. Chúng dài 2 mét, nặng khoảng 65 kg và di chuyển với tốc độ gần 0,5 km mỗi giờ. Chúng tiết kiệm năng lượng và có thể chạy bằng pin kiềm thông thường trong các nhiệm vụ nhỏ. Chúng không cần phải được triển khai từ boong của một tàu nghiên cứu, làm cho các nhiệm vụ tàu lượn tương đối rẻ. Nó có khả năng gửi dữ liệu thời gian thực thông qua cảm biến của nó
Xu hướng tương lai
Dự án C-Bot– Biến đổi khí hậu đã tạo ra một nhu cầu cấp thiết trong việc phát triển các hệ thống để theo dõi, phát hiện và dự đoán những thay đổi này trong các hiện tượng cục bộ một cách kịp thời. Giám sát rạn san hô được coi là một yếu tố dự báo đáng tin cậy về biến đổi khí hậu vì chúng nhạy cảm với những thay đổi nhỏ về nhiệt độ.
Hướng tới mục tiêu này, dự án Coral Bot (C-bot) là xây dựng một robot để theo dõi các rạn san hô ở vùng nước nông. Nó sẽ thay thế phương pháp hiện tại là sử dụng một thợ lặn với thiết bị máy ảnh để khảo sát các tầng rạn san hô
Dự án Mesobot– Việc phát triển một robot dưới nước tự hành, Mesobot, đang được xây dựng với khả năng mới là ghi lại sự sống độc đáo và phong phú trong "vùng chạng vạng", kéo dài từ độ sâu 200 m đến 1000 m. Nó có thể chứa nhiều sinh khối cá hơn so với tất cả các nghề cá trên toàn thế giới
Ban đầu, Mesobot sẽ được buộc, cho phép các phi công người xác định mục tiêu và sau đó, khi chúng di cư sâu hơn vào đại dương, nó sẽ theo dõi chúng một cách tự động, với việc sử dụng camera âm thanh nổi
Kết luận
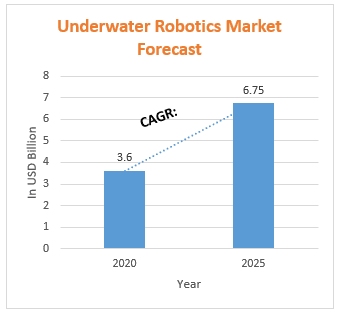
Robot biển có thể hỗ trợ các nhiệm vụ liên quan đến sự nguy hiểm đến tính mạng con người và khám phá những nơi mà sự can thiệp của con người là tốn kém hoặc gần như không thể. Động lực chính của sự tăng trưởng trong thị trường này là ứng dụng của nó trong quốc phòng, nghiên cứu công nghiệp và khoa học. Có một số lượng lớn các dự án đang diễn ra trong lĩnh vực robot biển, phát triển các công nghệ tốt hơn để nắm bắt lãnh thổ chưa được khám phá của đại dương. Các dự án nhằm mục đích giải quyết các thách thức công nghiệp và cung cấp các công cụ tốt hơn cho an toàn và khoa học để khám phá và nghiên cứu các đại dương
Điều hướng trong môi trường không giới hạn ngoài phạm vi của bộ phát đáp âm thanh vẫn là một trong những vấn đề cột mốc lớn cần được giải quyết.
Tác giả: Abhishek Saini