إحداث ثورة في المحيطات: تطورات في مجال الروبوتات البحرية للدفاع والبحث والصناعة
تختص الروبوتات بتصميم وبناء الروبوتات الميكانيكية القابلة للبرمجة. وتتمثل مهمتها في تكرار الأفعال البشرية. يعتبر تطوير هذه الروبوتات للاستخدام البحري أمرًا بالغ الأهمية للدفاع والبحث العلمي والتطبيقات الصناعية، بما في ذلك المراقبة والرصد البيئي وتدابير مكافحة الألغام وغير ذلك الكثير.
تتطلب السفن صيانة منتظمة والكثير من الموارد، بدءًا من صيانة الوقود والزيت وحتى التنظيف المنتظم، ويتعين صيانة أو استبدال عدد كبير من الأجزاء والمعدات للحفاظ على السفينة في حالة جيدة. في الكثير من الأحيان، تكون كل هذه المهام خطيرة وتطرح تحديات عند تنفيذها من قبل البشر. وتحقيقًا لهذه الغاية، فإن الروبوتات قادرة على التعامل مع هذه المهام. على سبيل المثال، يقوم HullBUG، وهو روبوت لتنظيف هياكل السفن تحت الماء، بتثبيت نفسه في الجزء السفلي من القارب لتنظيف السطح. وهناك روبوت آخر، وهو روبوت مكافحة الحرائق SAFFIR، وهو روبوت بشري مستقل قادر على اكتشاف وإخماد الحرائق على متن السفن، ويعمل جنبًا إلى جنب مع البشر.
طورت شركة Recon Robotics روبوتًا صغيرًا على شكل حديد رفع الأثقال لديه القدرة على اختراق السطح الرئيسي للقارب لإجراء فحص سري. تستخدم البحرية الأمريكية هذه التطورات حاليًا. تسمح الكاميرات الموجودة على الروبوت للمشغلين برؤية ما يحدث في الوقت الفعلي، حتى في الليل، باستخدام مستشعرات الأشعة تحت الحمراء.
أنظمة الروبوتات البحرية المستقلة
المركبات المستقلة تحت الماء- باختصار، AUVs، هي مركبات آلية يمكن استخدامها في مهام المسح تحت الماء مثل رسم خرائط الحطام المغمور ورسم خرائط قاع البحر وتوصيف مياه البحر. تجري هذه المركبات عمليات المسح دون تدخل المشغل، وهي قابلة للبرمجة وتعود إلى موقع مُبرمج مسبقًا حيث يمكن تنزيل البيانات ومعالجتها
المركبات المستقلة السطحية- باختصار، ASVs، هي مركبات آلية تطفو على سطح البحر لجمع البيانات المتعلقة بالمحيطات. لديها قدرة أكبر على حمل الحمولة وسعة البطارية مقارنة بالطائرات الشراعية. تحمل وحدات GPS وإيريديوم معها ويتم من خلال ذلك تنفيذ الاتصالات والقيادة. وهي مفيدة لجمع المراقبة الفوتوغرافية ومعلومات الطقس. تعتبر الحاصدات المستقبلية للبيانات، حيث ستقوم ASV بجمع البيانات من المركبات الموجودة تحت الماء ونقلها عبر إيريديوم
المركبة التي يتم تشغيلها عن بعد- باختصار، ROVs، هي روبوتات تحت الماء مقيدة وغير مأهولة، ومرتبطة بالسفينة بواسطة مجموعة من الكابلات التي تحمل الطاقة الكهربائية والفيديو وإشارات البيانات بين السيارة والمشغل
ISIS هو أعمق ROV للغوص في المملكة المتحدة. يقوم بجمع العينات وحفر لب الرواسب والتقاط فيديو عالي الدقة، مما يجعل من الممكن إجراء مسوحات معقدة على أعماق لا يمكن للغواصين الوصول إليها
الطائرات الشراعية- نوع من المركبات الموجودة تحت الماء تستخدم لقياس معايير المحيطات مثل درجة الحرارة ومستويات الكلوروفيل والملوحة، ثم يتم إرسالها مرة أخرى إلى الشاطئ. تستخدم مضخة داخلية لتغيير طفوها، مما يمكنها من التحرك لأعلى ولأسفل في الماء. يبلغ طولها مترين ويزن حوالي 65 كجم، وتسير بسرعة 0.5 كم تقريبًا في الساعة. إنها موفرة للطاقة ويمكن تشغيلها ببطاريات قلوية تقليدية في المهام الصغيرة. لا تتطلب نشرها من سطح سفينة أبحاث، مما يجعل مهام الطائرات الشراعية رخيصة نسبيًا. لديها القدرة على إرسال بيانات في الوقت الفعلي من خلال جهاز الاستشعار الخاص بها
الاتجاهات المستقبلية
مشروع C-Bot- لقد أدى تغير المناخ إلى خلق حاجة ملحة لتطوير أنظمة لمراقبة هذه التغيرات واكتشافها والتنبؤ بها في الظواهر المحلية في الوقت المناسب. تعتبر مراقبة الشعاب المرجانية مؤشرًا موثوقًا به لتغير المناخ لأنها حساسة للتغيرات الطفيفة في درجة الحرارة.
وتحقيقًا لهذه الغاية، يتمثل مشروع Coral Bot (C-bot) في بناء روبوت لمراقبة الشعاب المرجانية في المياه الضحلة. سيحل محل الطريقة الحالية المتمثلة في توظيف غواص بمعدات الكاميرا لمسح طبقات الشعاب المرجانية
مشروع Mesobot- يتم بناء Mesobot، وهو روبوت مستقل تحت الماء، بقدرة جديدة على التقاط الحياة الفريدة والوفيرة في "منطقة الشفق"، التي تمتد من 200 متر إلى 1000 متر. قد تؤوي كتلة حيوية من الأسماك أكثر مقارنة بجميع مصايد الأسماك في جميع أنحاء العالم
في البداية، سيتم ربط Mesobot، مما يسمح للطيارين البشريين بتحديد الأهداف وبعد ذلك، عندما يهاجرون إلى أعماق المحيط، سيتبعهم بشكل مستقل، وذلك باستخدام كاميرات مجسمة
الخلاصة
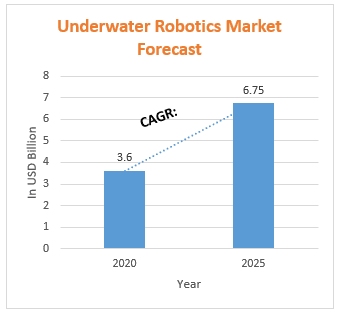
تستطيع الروبوتات البحرية المساعدة في المهام المرتبطة بالخطر على حياة البشر واستكشاف الأماكن التي يكون فيها التدخل البشري مكلفًا أو شبه مستحيل. المحرك الرئيسي للنمو في هذا السوق هو تطبيقه في الدفاع والبحث الصناعي والعلمي. هناك عدد كبير من المشاريع الجارية في مجال الروبوتات البحرية لتطوير تقنيات أفضل لالتقاط المنطقة المجهولة من المحيطات. تهدف المشاريع إلى حل التحديات الصناعية وتوفير أدوات أفضل للسلامة والعلوم لاستكشاف ودراسة المحيطات
يظل الملاحة في البيئات غير المحصورة خارج نطاق أجهزة الإرسال والاستقبال الصوتية أحد أهم المشكلات التي يجب حلها.
المؤلف: Abhishek Saini