Revolutionierung der Ozeane: Fortschritte in der marinen Robotik für Verteidigung, Forschung und Industrie
Die Robotik widmet sich dem Design und der Konstruktion von programmierbaren mechanischen Robotern. Ihre Aufgabe ist es, menschliche Handlungen zu replizieren. Die Entwicklung solcher Roboter für den Einsatz im Meer ist von entscheidender Bedeutung für die Verteidigung, die wissenschaftliche Forschung und industrielle Anwendungen, einschliesslich Überwachung, Umweltmonitoring und Minenabwehr und vieles mehr.
Schiffe benötigen regelmässige Wartung und viele Ressourcen, von der Wartung von Treibstoff und Öl bis hin zur regelmässigen Reinigung. Eine grosse Anzahl von Teilen und Geräten muss gewartet oder ausgetauscht werden, um das Schiff in gutem Zustand zu halten. Oft sind all diese Aufgaben gefährlich und herausfordernd, wenn sie von Menschen ausgeführt werden. Zu diesem Zweck sind Roboter in der Lage, solche Aufgaben zu übernehmen. Zum Beispiel befestigt sich HullBUG, ein Unterwasser-Rumpfreinigungsroboter, zur Oberflächenreinigung am Boden des Bootes. Ein anderer Roboter, der SAFFIR-Feuerwehrroboter, ist ein autonomer humanoider Roboter, der in der Lage ist, Brände an Bord zu erkennen und zu löschen und Seite an Seite mit Menschen zu arbeiten.
Recon Robotics hat einen kleinen, hantelförmigen Roboter entwickelt, der in der Lage ist, das Hauptdeck eines Bootes zur diskreten Inspektion zu durchdringen. Diese Entwicklungen werden derzeit von der US-Marine eingesetzt. Kameras am Roboter ermöglichen es den Bedienern, in Echtzeit zu sehen, was passiert, sogar nachts, mit Hilfe von Infrarotsensoren.
Marine Autonome Robotersysteme
Autonome Unterwasserfahrzeuge– Kurz AUVs, sind Roboterfahrzeuge, die für Unterwassererkundungsmissionen wie die Kartierung versunkener Wracks, die Kartierung des Meeresbodens und die Charakterisierung von Meerwasser eingesetzt werden können. Sie führen Vermessungen ohne Eingreifen des Bedieners durch, sind programmierbar und kehren zu einem vorprogrammierten Ort zurück, wo Daten heruntergeladen und verarbeitet werden können.
Autonome Oberflächenfahrzeuge– Kurz ASVs, sind Roboterfahrzeuge, die auf der Meeresoberfläche sitzen und ozeanografische Daten sammeln. Sie haben eine grössere Nutzlast- und Batteriekapazität als Gleiter. Sie führen GPS- und Iridium-Module mit sich, über die die Kommunikation und die Steuerung erfolgen. Sie sind nützlich für das Sammeln von fotografischen Überwachungs- und Wetterinformationen. Sie gelten als die zukünftigen Datensammler, bei denen ASV Daten von Unterwasserfahrzeugen sammelt und über Iridium weiterleitet.
Ferngesteuertes Fahrzeug– Kurz ROVs, sind gefesselte Unterwasserroboter, die unbemannt sind und über eine Gruppe von Kabeln mit dem Schiff verbunden sind, die elektrische Energie, Video- und Datensignale zwischen dem Fahrzeug und dem Bediener übertragen.
ISIS ist der am tiefsten tauchende ROV Grossbritanniens. Er sammelt Proben, bohrt Sedimentkerne und nimmt hochauflösende Videos auf, wodurch es möglich wird, komplizierte Vermessungen in Tiefen durchzuführen, die für menschliche Taucher unerreichbar sind.
Gleiter– Eine Art Unterwasserfahrzeug, das zur Messung ozeanografischer Parameter wie Temperatur, Chlorophyllgehalt und Salzgehalt verwendet wird und die Daten dann an Land zurücküberträgt. Er verwendet eine interne Pumpe, um seinen Auftrieb zu verändern, wodurch er sich im Wasser auf und ab bewegen kann. Sie sind 2 Meter lang, wiegen etwa 65 kg und fahren mit einer Geschwindigkeit von fast 0,5 km pro Stunde. Sie sind energieeffizient und können bei kleinen Missionen mit herkömmlichen Alkalibatterien betrieben werden. Sie müssen nicht vom Deck eines Forschungsschiffes aus eingesetzt werden, was Gleitermissionen relativ kostengünstig macht. Er ist in der Lage, Echtzeitdaten über seinen Sensor zu senden.
Zukünftige Trends
C-Bot-Projekt– Der Klimawandel hat die dringende Notwendigkeit geschaffen, Systeme zu entwickeln, um diese Veränderungen in lokalen Phänomenen zeitnah zu überwachen, zu erkennen und vorherzusagen. Die Überwachung von Korallenriffen gilt als zuverlässiger Indikator für den Klimawandel, da sie empfindlich auf kleine Temperaturveränderungen reagieren.
Zu diesem Zweck soll das Coral Bot (C-bot)-Projekt einen Roboter bauen, der Korallenriffe in flachen Gewässern überwacht. Er wird die heutige Methode ersetzen, bei der ein Taucher mit Kameraausrüstung zur Vermessung von Korallenriffen eingesetzt wird.
Mesobot-Projekt– Die Entwicklung eines autonomen Unterwasserroboters, Mesobot, wird mit der neuen Fähigkeit gebaut, das einzigartige und reichhaltige Leben in der "Dämmerungszone" einzufangen, die sich von 200 m bis 1000 m Tiefe erstreckt. Sie beherbergt möglicherweise mehr Fischbiomasse als alle Fischereien weltweit.
Anfangs wird Mesobot gefesselt sein, so dass menschliche Piloten Ziele identifizieren können, und danach, wenn sie tiefer in den Ozean wandern, wird er ihnen autonom folgen, mit Hilfe von Stereokameras.
Schlussfolgerung
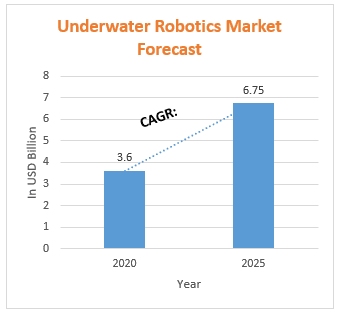
Die Meeresrobotik ist in der Lage, bei Aufgaben zu helfen, die mit Gefahren für das menschliche Leben verbunden sind, und Orte zu erforschen, an denen menschliches Eingreifen entweder teuer oder fast unmöglich ist. Der Haupttreiber für das Wachstum in diesem Markt ist seine Anwendung in der Verteidigung, der Industrie und der wissenschaftlichen Forschung. Es gibt eine grosse Anzahl von laufenden Projekten in der Meeresrobotik, die bessere Technologien entwickeln, um das unerforschte Gebiet der Ozeane zu erfassen. Die Projekte zielen darauf ab, industrielle Herausforderungen zu lösen und bessere Werkzeuge für die Sicherheit und die Wissenschaft bereitzustellen, um die Ozeane zu erforschen und zu untersuchen.
Die Navigation in unbegrenzten Umgebungen ausserhalb der Reichweite von akustischen Transpondern bleibt eines der grössten Meilensteinprobleme, die es zu lösen gilt.
Autor: Abhishek Saini