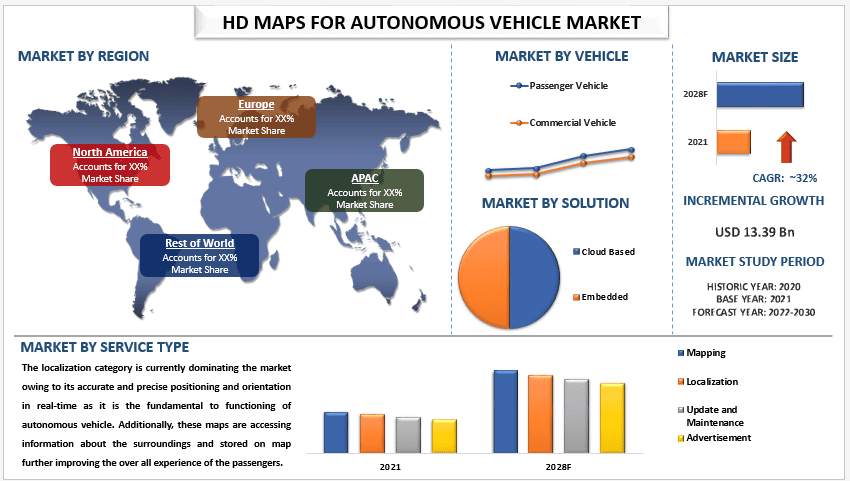
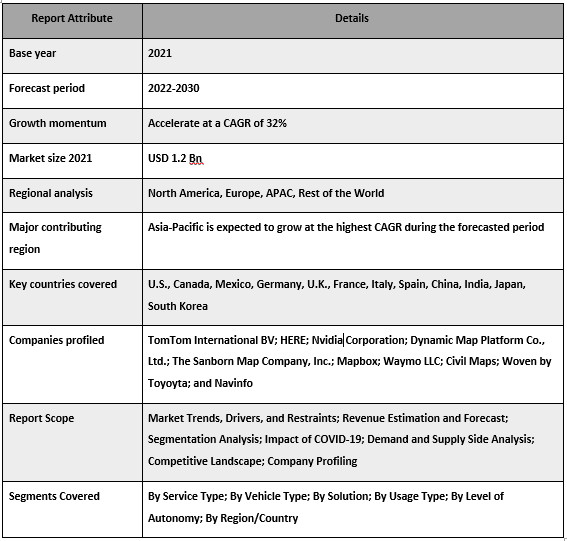
自動駕駛汽車高清地圖市場在 2022 年的估值為 12 億美元,由於全球自動駕駛汽車的蓬勃發展,預計在預測期內(2023-2030 年)將以約 32% 的強勁複合年增長率增長。 自動駕駛汽車或無人駕駛汽車能夠自行運作,並在沒有任何人工干預的情況下執行所有必要的功能,這歸功於它感知周圍環境的能力。由於雷達和技術以及各種類型的感測器和微處理器的發展,使得根據自我改進的演算法做出決策,因此在過去幾年中,對自動駕駛汽車的需求迅速增長。此外,普通車輛由於人類決策管理不善而發生事故的機率非常高,這也是道路交通事故中造成死亡的主要原因,但在自動駕駛汽車中則完全消除了這種情況。例如,根據國家公路交通安全管理局的數據,2021 年,分心駕駛非常危險,在道路交通事故中奪走了 3,522 條生命。 此外,自動駕駛汽車比普通車輛具有許多優勢,例如更高的安全性、ADAS、更好的交通管理和排放量,這些都進一步滿足了對傳統車輛的需求。因此,自動駕駛汽車的日益普及推動了未來幾年對自動駕駛市場高清地圖的需求。
在市場上運營的一些主要參與者包括 TomTom International BV;HERE;Nvidia Corporation;Dynamic Map Platform Co., Ltd.;The Sanborn Map Company, Inc.;Mapbox;Waymo LLC;Civil Maps;Woven by Toyoyta;和 Navinfo。這些參與者進行了多次併購以及合作夥伴關係,以利用高科技和創新產品/技術來便利客戶。
報告中提供的見解
「在服務類型中,本地化部門在 2021 年佔據了市場的主導份額」
根據服務類型,市場分為地圖繪製、本地化、更新和維護以及廣告。其中,本地化類別目前在市場上佔據主導地位,預計在預測期內也會呈現相同的趨勢。該部門增長的主要因素歸因於其準確和精確的即時定位和定向,因為它是自動駕駛汽車運作的基礎。由於這些車輛需要周圍環境資訊,例如交通控制、道路幾何形狀和其他物體,以便借助一堆感測器、攝影機、雷達和光達來執行規劃和控制。此外,這些感測器無法檢測到被其他車輛阻擋的物理環境,為了繞過這個問題,自動駕駛汽車中使用了高清地圖。此外,這些地圖可以訪問有關周圍環境的資訊並儲存在地圖上,從而進一步改善乘客的整體體驗。
「在解決方案中,雲端部門在 2021 年佔據了市場的顯著份額」
根據解決方案,市場分為雲端和嵌入式。其中,雲端部門預計將在 2022 年佔據市場的顯著份額,並預計在預測期內將表現相同。這主要是因為與本質上更具靜態性的嵌入式地圖相比,基於雲端的具有互動式使用者介面,並具有更多載入的功能。此地圖的主要目標是提供從 A 點到 B 點的路線資訊,並新增上下文圖形資訊,以幫助使用者解釋引導服務
「亞太地區是 2021 年自動駕駛汽車高清地圖增長最快的市場」
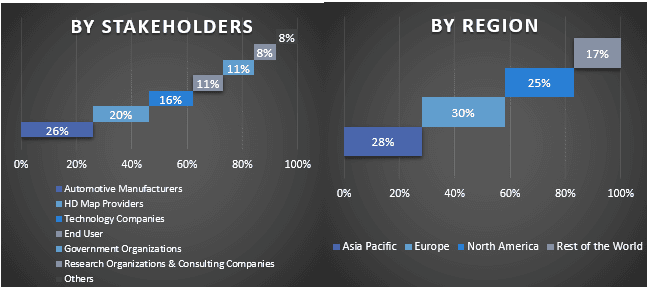
由於亞太地區的汽車產業正在蓬勃發展,其中不乏現代、比亞迪、馬恆達等大型巨頭,因此預計該地區將在預測期內成為增長最快的地區。此外,中國和印度等國家增加了對研發的投資,這也支持政府政策,並推動了自動駕駛市場高清地圖的增長。例如,2021 年 8 月,中國修改了關於無人駕駛汽車測試的法規,允許符合條件的公司在高速公路和城市道路上試驗用於運輸乘客和貨物的自動駕駛汽車,以期加速自動駕駛技術的商業化。此外,該地區是 IT 基礎設施的樞紐,擁有 NavInfo 和 Momenta 等多家 OEM,這些 OEM 開發技術先進的地圖,並與 Here 和 Analog Devices 等公司攜手合作,從而推動了自動駕駛汽車高清地圖市場的增長。
自動駕駛汽車高清地圖市場報告涵蓋範圍
購買本報告的理由:
- 該研究包括經過驗證的關鍵行業專家驗證的市場規模和預測分析。
- 該報告一目瞭然地對整體產業績效進行了快速回顧。
- 該報告涵蓋了對傑出行業同行的深入分析,主要側重於關鍵業務財務、產品組合、擴張策略和最新發展。
- 詳細檢查行業中存在的驅動因素、限制、主要趨勢和機會。
- 該研究全面涵蓋了跨不同細分市場的市場。
- 深入分析該產業的區域層級。
客製化選項:
全球自動駕駛汽車高清地圖市場可以根據需求或任何其他市場細分進一步客製化。除此之外,UMI 了解您可能有自己的業務需求,因此請隨時與我們聯繫以獲取完全符合您需求的報告。
目錄
自動駕駛車市場分析用高清地圖研究方法 (2022-2030)
分析歷史市場、估算當前市場和預測全球自動駕駛車市場用高清地圖的未來市場,是創建和分析全球主要地區採用自動駕駛車用高清地圖的三個主要步驟。 我們進行了詳盡的二級研究,以收集歷史市場數據並估算當前市場規模。 其次,為了驗證這些見解,我們考慮了眾多的發現和假設。 此外,我們還與全球自動駕駛車市場用高清地圖價值鏈中的行業專家進行了詳盡的初步訪談。 在通過初步訪談假設和驗證市場數據後,我們採用了自上而下/自下而上的方法來預測完整的市場規模。 此後,我們採用市場細分和數據三角測量方法來估算和分析該行業相關的細分市場和子細分市場的市場規模。 詳細方法如下所述:
歷史市場規模分析
步驟 1:深入研究二級來源:
我們進行了詳細的二級研究,通過公司內部來源(例如年度報告和財務報表、績效演示文稿、新聞稿等)以及外部來源(包括期刊、新聞和文章、政府出版物、競爭對手出版物、行業報告、第三方數據庫和其他可靠的出版物)來獲取自動駕駛車市場用高清地圖的歷史市場規模。
步驟 2:市場細分:
在獲得自動駕駛車市場用高清地圖的歷史市場規模後,我們進行了詳細的二級分析,以收集主要地區不同細分市場和子細分市場的歷史市場見解和份額。 報告中包含的主要細分市場包括服務類型、車輛類型、解決方案、使用類型和自動駕駛等級。 此外,我們還進行了國家層面的分析,以評估該地區測試模型的總體採用情況。
步驟 3:因素分析:
在獲得不同細分市場和子細分市場的歷史市場規模後,我們進行了詳細的因素分析,以估算自動駕駛車市場用高清地圖的當前市場規模。 此外,我們使用自變量和因變量(例如自動駕駛車市場用高清地圖的服務類型、車輛類型、解決方案、使用類型和自動駕駛等級)進行了因素分析。 我們對需求和供應側情景進行了 Thorough 分析,考慮了全球自動駕駛車市場領域的頂級合作夥伴關係、併購、業務擴張和產品發布。
當前市場規模估計與預測
當前市場規模:基於上述 3 個步驟的可行見解,我們得出了當前市場規模、全球自動駕駛車市場用高清地圖的主要參與者以及各細分市場的市場份額。 所有必需的百分比份額拆分和市場細分均使用上述二級方法確定,並通過初步訪談進行了驗證。
估算與預測:對於市場估算和預測,我們為不同因素(包括驅動因素和趨勢、限制因素以及利益相關者可獲得的機會)分配了權重。 在分析了這些因素後,我們應用了相關的預測技術,即自上而下/自下而上的方法,以得出全球主要市場不同細分市場和子細分市場的 2028 年市場預測。 用於估算市場規模的研究方法包括:
- 該行業的市場規模,以收入(美元)計,以及自動駕駛車市場用高清地圖在國內主要市場的採用率
- 所有百分比份額、拆分和市場細分市場和子細分市場的細分
- 全球自動駕駛車市場用高清地圖的主要參與者(就提供的產品而言)。 此外,這些參與者為在快速增長的市場中競爭而採用的增長策略
市場規模和份額驗證
初步研究:與主要地區的關鍵意見領袖 (KOL)(包括高層管理人員(CXO/VP、銷售主管、營銷主管、運營主管、區域主管、國家主管等))進行了深入訪談。 然後總結初步研究結果,並進行統計分析以證明所陳述的假設。 初步研究的輸入與二級研究結果合併,從而將信息轉化為可操作的見解。
不同地區初步參與者拆分
市場工程
我們採用了數據三角測量技術來完成整體市場估算,並得出全球自動駕駛車市場用高清地圖的每個細分市場和子細分市場的精確統計數據。 在研究了全球自動駕駛車市場用高清地圖的服務類型、車輛類型、解決方案、使用類型和自動駕駛等級等領域的各種參數和趨勢後,數據被拆分為幾個細分市場和子細分市場。
全球自動駕駛車市場用高清地圖研究的主要目標
研究中指出了全球自動駕駛車市場用高清地圖的當前和未來市場趨勢。 投資者可以獲得戰略見解,以根據研究中進行的定性和定量分析來決定投資。 當前和未來市場趨勢決定了區域層面市場的總體吸引力,從而為行業參與者提供了一個利用未開發市場的平台,從而受益於先發優勢。 該研究的其他定量目標包括:
- 分析自動駕駛車市場用高清地圖的當前和預測市場規模(以價值(美元)計)。 此外,分析不同細分市場和子細分市場的當前和預測市場規模
- 研究中的細分市場包括服務類型、車輛類型、解決方案、使用類型和自動駕駛等級等領域
- 定義和分析自動駕駛車行業用高清地圖的監管框架
- 分析與各種中介機構的存在相關的價值鏈,以及分析行業的客戶和競爭對手行為
- 分析主要地區自動駕駛車市場用高清地圖的當前和預測市場規模
- 報告中研究的地區的主要國家/地區包括亞太地區、歐洲、北美和世界其他地區
- 自動駕駛車市場用高清地圖的公司概況以及市場參與者為在快速增長的市場中維持發展而採用的增長策略
- 深入分析該行業的區域層面
相關 報告
購買此商品的客戶也購買了